Robot Visual Servoing
Conventional robotic systems rely on an open-loop kinematic chain to position an end-effector (or its tooling) relative to a target object. As such, any uncertainty about the robot end-point position (e.g., due to kinematic calibration issues, joint slippages, links bending, etc.) and object position (e.g., with randomly positioned objects in fixtureless environments) could lead to a task failure. Our robust solution relies on visual servo data (e.g., using laser and vision sensors) to directly measure and control the end-point relative to the object. Several industrial-grade solutions are available..
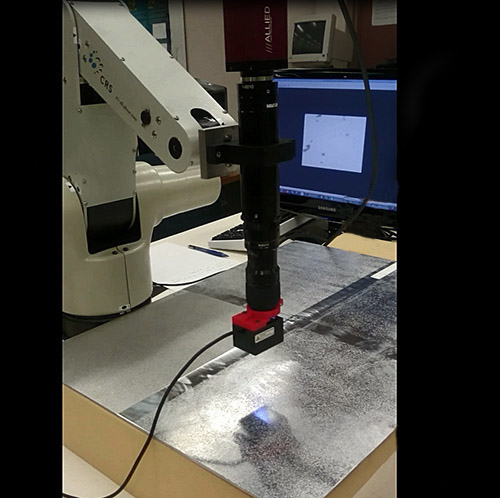
Vision-based Robotic Peening
Many peening operations and peened surface inspection for coverage measurements, especially in aerospace industry, are conducted manually. In addition to the expenses involved, issues related to process accuracy and ergonomics are also hindering the efficiency of the peening processes. Our robotic peening and surface inspection solutions (patent pending) provide an attractive alternative to conventional approaches. The developed visual servo control methods enable automatic traverse of the robotic endpoint (for holding gun and inspection camera) over unmodeled and complex surfaces. We have shown that the accuracy and efficiency of the process can be significantly improved through the adoption of our robotic techniques.
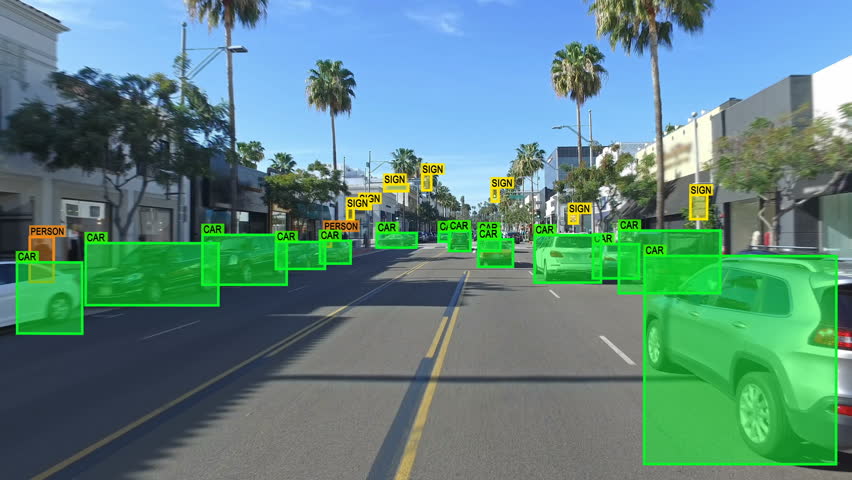
3D Object Detection and Pose Estimation
Automatic generation of estimation of objects’ pose (position and orientation) relative to the environment is a long-pending challenge in computer vision. We are working with automotive industry to develop efficient pose estimation of unknown objects with an accuracy of 90%+.
Vision-based Surface Inspection
Our visual inspection platform can detect surface anomalies and calculate surface coverage in millimeter scale for variety of surfaces, from planar to hyperbolic surfaces. Applications include surface peening coverage measurement, paint coverage inspection, surface finish assessment, and so on.

Robot Visual Learning by Demonstration
Robot programming is a relatively expensive process across various operation lines. Besides, for many emerging applications (such as service robots), it is not feasible to integrate conventional human-based programming. There is a high demand for robot programming by demonstration (PbD). Our patented technology is based on a novel method for automatic programming of a robotic manipulator by learning from human demonstrations. The approach relies on marker-less perception of task examples for detecting and tracking objects of interests, and a theoretical platform for learning new robotic manipulator tasks through visual understanding of the task constraints at the trajectory level of abstraction.

Robotic Visual Cloud Computing
The increased use of computer vision in robotic platforms and need for inter-connectivity have enabled robotic visual cloud computing for a variety of applications including 3D scene understanding, robotic active vision, and immersive live experiences. We are developing robust platforms for both ground and aerial robotic vision systems.